Volle Beere in die Zukunft – mit unserem neuen Ernteroboter
Die deutschen Landwirte sehen sich derzeit mit immensen Herausforderungen konfrontiert. Der Einsatz von Düngemittel soll reduziert werden, gleichzeitig gibt es einen eklatanten Arbeitskraftmangel. Damit diese Betriebe auch in Zukunft von ihren Erträgen leben und wir Erzeugnisse aus dem eigenen Land genießen können, entwickelt IAV innovative Robotik-Systeme, die sich an den aktuellen Marktbedürfnissen orientieren.
Den Anfang macht die Erdbeere
Die Liste der Vorteile, die Robotik den Landwirten erschließt, ist lang. Ihre Betriebe können effizienter, flexibler und planbarer agieren und dadurch ihre Produktivität steigern. Der Ernteroboter ist derzeit auf das Pflücken von Erdbeeren spezialisiert, das System lässt sich jedoch skalieren und auch auf weitere Zielfrüchte, wie etwa Tomaten oder Paprika anpassen.
Technologische Highlights
-
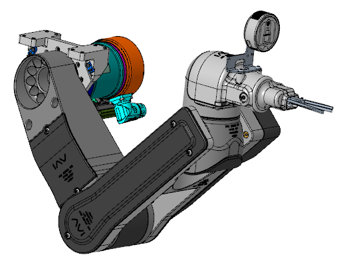
Patentierte Scheren- und Fächergreifer
Erdbeeren sind „sensible Früchtchen“. Das Pflücken erfordert eine Menge Fingerspitzengefühl, um die Beeren nicht zu beschädigen und ohne Druckstellen im Körbchen abzulegen. Die patentierten Scheren- und Fächergreifer des Roboters fassen die Erdbeeren deshalb mit Samthandschuhen an, schneiden die Frucht am Stiel ab, greifen sie gleichzeitig, damit sie nicht herunterfällt und legen sie sorgfältig in der Palettierung ab. Zudem sind die Werkzeuge spritzwassergeschützt und kommen mit unterschiedlichsten Luftfeuchtigkeitswerten zurecht.
-
Computervision
Der Einsatz von Computervision-Technologie, also dem Zusammenspiel von Kamera, Cloud-Computing und Künstlicher Intelligenz, erhöht die Erkennungsrate der Zielfrüchte erheblich. Dafür wurden tausende Bilder diverser Früchte zu verschiedenen Tages- und Nachtzeiten eingesetzt, um den Algorithmus zu optimieren, die Position der einzelnen Erdbeere präzise zu ermitteln und den Reifegrad der Frucht zu bestimmen.
-
Erkennt Früchte auch in der zweiten Reihe
Was passiert eigentlich, wenn reife Erdbeeren von noch grünen Früchten verdeckt sind? Kein Problem für unseren Ernteroboter. Die KI lokalisiert sowohl die grünen als auch die roten Früchte präzise, sodass die Scheren sicher um die noch nicht reifen Beeren herumnavigieren und auch Erdbeeren in zweiter Reihe zielsicher abernten kann.
-
Bis zu 20 Stunden Pflücken ohne Pause
Unser Roboter pflückt Erdbeeren – Tag und Nacht. Durch die integrierte Nachtbeleuchtung des Roboters kann die Ernte auch nach Sonnenuntergang fortgesetzt werden, kontinuierlich, mit immer der gleichen Qualität. Die im Schubkastensystem integrierte Wechselbatterie sorgt außerdem dafür, dass dem Roboter nicht der Saft ausgeht, lange Ladepausen sind nicht erforderlich.
-
Ernte ohne spezifische Infrastruktur
Das Robotersystem ist eigenständig auf einer Fahreinheit unterwegs. Seine Anwendung findet der Ernteroboter in langen Pflanzgängen, sogenannten Stellagen, in denen Pflanzkästen auf Stützen in einer Höhe von etwa einem Meter angebracht sind. Damit der Roboter sich ans Ernten machen kann, ist keine weitere Infrastruktur, etwa in Form von Schienen erforderlich.
-
Intensive Dauerlauf-Tests
Bei unserem Projektpartner und bei eigens dafür entwickelten und aufgebauten Prüfständen absolviert der Roboter bereits Dauertests. Im Rahmen dieser Tests werden über 3,5 Millionen Schnitte und eine Arbeitszeit von 2500 Stunden sicher gemeistert. Entsprechend können sowohl die Quantität als auch die Qualität und die Robustheit von Hard- und Softwarefunktionale Sicherheit bei der Arbeit unseres Roboter-Erntehelfers gewährleistet werden.

-
Bewährte Technologien aus Automotive-Umfeld
Unsere Ingenieursteams sind es gewohnt, Gesamtsysteme auf die Straße zu bringen, die vom Gesetzgeber freigegeben werden und in die sich Menschen hineintrauen, für viele zehntausend Kilometer und über viele Jahre hinweg. Den gleichen Qualitätsanspruch verfolgen wir auch bei der funktionalen Sicherheit des Ernteroboters. In das Produkt fließt langjähriges Methodenwissen aus den Bereichen autonomer Prozesse, Automatisierung, Objekterkennung, Regelungstechnik, Künstliche Intelligenz, sowie fertigungsoptimiertes Design mit ein.
Unsere Mission - die Landwirtschaft stärken und das Klima schonen
Als Tech Solution Provider entwickeln wir modernste Engineering-Lösungen und stellen sie dort zur Verfügung, wo sie gebraucht werden. Im Bereich der Advanced KI-Robotics hat IAV einen Technologietransfer vollzogen. Bewährte Technologien aus dem Automotive-Sektor wandern von der Straße auf den Acker.
Dadurch wird unser Ernteroboter zu einem wichtigen Baustein auf dem Weg zur Landwirtschaft 4.0. Er kann Landwirte dabei unterstützen die Wettbewerbsfähigkeit des Standortes Deutschland aufrechtzuerhalten. Denn gezielt eingesetzte Robotertechnik erhöht den Grad der Digitalisierung, Vernetzung und Automatisierung in den Betrieben und garantiert dadurch Sicherheit, Ergonomie und Anpassungsfähigkeit in den Arbeitsabläufen.
Anpassungsfähigkeit ist stark gefragt, denn den Landwirten fällt es immer schwerer genügend Erntehelfer zu finden. Der Ernteroboter löst dieses Problem und ermöglicht es den Landwirten ihre Erzeugnisse zu konkurrenzfähigen Preisen anzubieten. Das stärkt nicht nur den heimischen Wirtschaftsstandort, sondern schont auch die Umwelt, da weniger Waren aufwendig importiert werden müssen.






“Deutschland ist mit seinem tiefen technischen Verständnis sowie seiner Entwicklungs- und Fertigungstiefe wie gemacht für eine Hochtechnologie wie Advanced-KI-Robotics.”
(Enrico Neumann, Produktmanager)
Die Reifung des Roboters – Wie alles begann
Seit 2020 arbeitet IAV am Ernteroboter. Das Video zeigt den ersten Prototypen für den Schneidarm des Roboters während einer Demonstration am Standort Gifhorn, an der auch Niedersachsens Ministerpräsident Stephan Weil teilnahm.
Seitdem ist viel passiert. In nur zwei Jahren ist es gelungen den Roboterarm grundlegend weiterzuentwickeln, die Computer Vision zu optimieren und den Roboter zu einem autonom fahrenden und pflückenden System zu entwickeln und auf echten Erdbeerfeldern in Deutschland zu erproben.
Erprobung bei Projektpartner und im Entwicklungszentrum
![]()
Die großen Fortschritte in der Entwicklung des Ernteroboters in den vergangenen zwei Jahren waren auch nur dank starker Partner möglich. Mit Karls Erdbeerhof hat IAV einen Partner an seiner Seite, der die nötigen Grundlagen und Randbedingungen schafft, damit der Ernteroboter arbeiten und lernen kann.
In der Entwicklungsphase profitiert unser Ingenieursteam von dem breiten Erfahrungsschatz der Beschäftigten bei Karls, lernte die Eigenheiten der Erdbeere und ihre verschiedenen Sorten und Verarbeitungsmöglichkeiten kennen. Denn nur in der Kombination aus Erdbeer-Know-how und Engineering-Expertise kann ein Ernteroboter entstehen, der den höchsten Qualitätsansprüchen der Landwirte und Erdbeer-Konsumenten genügt.
Mehr noch: Karls treibt eigene Digitalisierungs- und Nachhaltigkeitsinitiativen aus dem Blickwinkel des Farmers im eigenen Betrieb voran und bringt sich aktiv in die Entwicklung des Ernteroboters mit ein. Als unser sogenannter Kunde „0“, lernt Karls mit, und ist auch bereit erste Fehlschläge mitzuerleben. Zudem bringt das Unternehmen sämtliche zur Verfügung stehende Innovationen mit in das Projekt ein, etwa mit der Anbauweise überdachter und klimatisierter Stellagen, sowie diverser Fruchtsorten und Anbautechniken.
Mit Uli Osterloh bekommt IAV von einem zweiten Schwergewicht der Branche einen eigenen Blickwinkel und damit wertvollen Input, in Form von Ideen und individuellen Randbedingungen, die zwischen landwirtschaftlichen Betrieben mal mehr mal weniger voneinander abweichen können.
Darüber hinaus wurde eine eigene Stellage am IAV-Entwicklungszentrum in Gifhorn errichtet, um die Prototypen-Entwicklung nicht nur bei unseren Partnern vor Ort, sondern auch direkt neben den eigenen Werkstätten vorantreiben zu können.





Je nach Länge der Stellagen des landwirtschaftlichen Betriebes und gezüchteter Erdbeersorte fallen pro Pflanzgang auch unterschiedliche Mengen an zu erntenden Früchten an. Damit der Ernteroboter so autonom wie möglich agieren kann, muss auch die Zwischenlagerung der Früchte mitgedacht werden. Ein eigenes Palettierungssystem sorgt hierbei für die notwendige Flexibilität.
In der aktuellen Baustufe des Anhängers können bis zu zwölf Stiegen, also standardisierte Paletten in denen die Verkaufskörbchen stehen, auf übereinander angeordneten Bestückungsebenen transportiert werden. Der Austausch von leeren und vollen Stiegen zwischen Roboter und Anhänger erfolgt über eine Anpassung des Neigungswinkels der Rollenbahnen über die Hubsäulen. Mit dem Hänger-System erhöht sich die Lagerungskapazität des Roboters deutlich, verringert gleichzeitig den händischen Entladungsaufwand des Personals und beschleunigt so den Ernteprozess insgesamt.
Da der Roboter und der Anhänger unabhängig voneinander funktionsfähig sind, ist perspektivisch auch der Einsatz automatisierter Anhänger für mehrere Roboter denkbar.
AgEng Landtechnik Berlin November 2022
Nach der anstrengenden Arbeit auf dem Feld in dieser Erdbeersaison folgte der wohlverdiente Schaulauf für unseren Ernteroboter auf der AgEng Landtechnik in Berlin.
Es war eine Premiere für den Roboter – denn er wurde zum ersten Mal der Öffentlichkeit präsentiert. Unser Team vor Ort nutzte die Gelegenheit, um mit zahlreichen interessierten Teilnehmern aus Wissenschaft und Industrie ins Gespräch zu kommen.





